



机器人校准标定虚拟仿真系统
在当今机器人技术不断取得突破的时代,机械臂视觉控制系统相关研究也日益重要。机械臂视觉控制系统实现方法、控制算法研究以及系统的设计与实现等都是该领域的关键研究方向。而机器人校准标定虚拟仿真系统在这个过程中发挥着重要的作用。
南京工业职业技术大学已经引入了机器人校准标定虚拟仿真系统。该系统在机械臂视觉控制系统的研究和教学中有着极大的应用潜力。工业机器人运动学校准标定是机器人学研究的重要内容,这与机械臂视觉控制系统的关键技术有着紧密的联系。工业机器人校准标定是一个集建模、测量、机器人实际参数辨识、误差补偿实现与一体的过程,在机器人产业化的背景下有重要的理论和工程意义,对于机械臂视觉控制系统在工业中的应用也有着重要的指导价值。
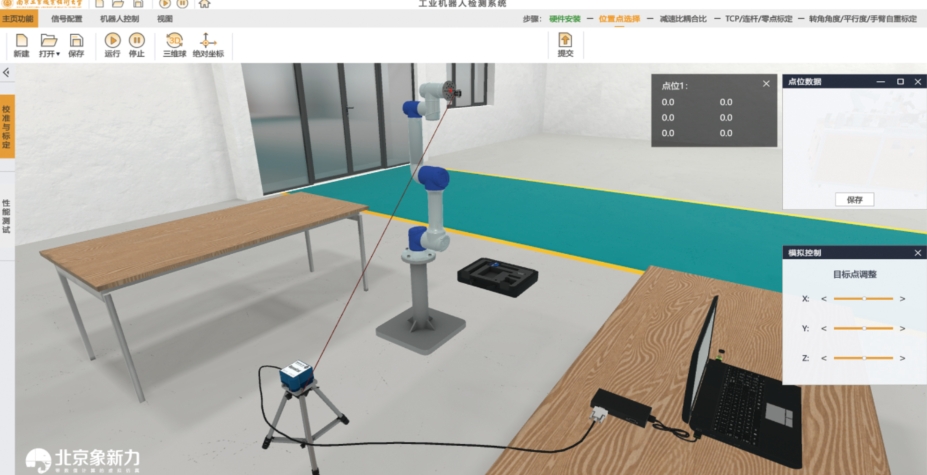
工业机器人校准标定系统将高精尖的校准标定系统在 PC 端呈现,用户可随时随地通过 PC 进行机器人模拟校准标定,掌握校准标定的原理、方法以及操作流程。这对于想要了解如何进行机械臂的虚拟仿真实验的人来说,是一个很好的学习途径。通过对硬件的搭建准备和软件的详细操作,以软硬结合的方式,进行校准标定的学习训练,也有助于优化机械臂的视觉控制系统。
该系统能够让用户在虚拟仿真环境下进行机械臂控制实验。用户可以使用虚拟仿真测试机械臂性能,还能通过系统进行机械臂视觉检测与控制系统优化。系统分为学习模式和考核模式。在学习模式中,系统提供各步骤的操作的图文指引和高亮提示,引导用户逐步学习校准标定过程,这对于机械臂与视觉系统结合的实验流程的学习非常有帮助;在考核模式中,系统不提供指引提示,用户需根据学习模式学习掌握的内容,进行校准标定操作,这有助于实现机械臂视觉控制的关键挑战的攻克。
无论是学习模式还是考核模式,都能让用户对机械臂视觉控制系统进行实验验证。同时,该系统也能支撑众多相关课程,如机器人机械系统、机器视觉、机器人控制技术等,对于基于视觉的机械臂控制算法设计以及机械臂视觉控制系统研究综述等方面的学习和研究有着重要的辅助作用。